Оценка вероятности безопасного положения судна в узкости
Узкостями считаются акватории, в которых ограничена свобода маневра судна близлежащими навигационными опасностями.
К узкостям относятся гавани, рейды, бухты, проливы, шхеры, фьорды, районы с минными или сетевыми заграждениями, прибрежные мелководные районы, проходы между бонами, молами и другими сооружениями, представляющими опасность для свободного прохода судна.
Если навигационные опасности являются наблюдаемыми, то обеспечение навигационной безопасности плавания сводится к соблюдению правил плавания, основанных на принципах управления судном с учетом его маневренных качеств, размеров и динамических характеристик. Столкновение с наблюдаемой опасностью может произойти только в том случае, если произошел сбой в организации штурманской службы и при промахах в управлении судном.
С точки зрения навигации наиболее опасными узкостями являются те, в которых свобода маневра ограничена ненаблюдаемыми навигационными опасностями – искусственными и естественными подводными препятствиями, банками, подводными скалами и отмелями. Для оценки безопасности плавания в таких районах в период предварительной подготовки к походу производится расчет вероятности свободного прохода для каждого участка узкости и для планируемых средств и методов судовождения.
Если курсы судна проложены среди ненаблюдаемых навигационных опасностей так, что последние находятся на различных направлениях относительно судна, то для оценки навигационной безопасности удобней всего пользоваться радиальной средней квадратической погрешностью (рис.3.1).
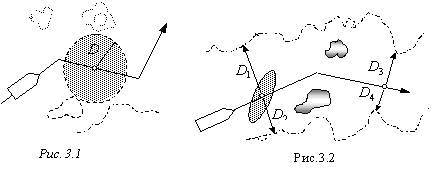
Относительно точки на линии предстоящего пути, находящейся на кратчайшем расстоянии от навигационных опасностей, вписывается круг так, чтобы внутри него не оказалось навигационных опасностей. Измеряется радиус этого круга D и затем рассчитывается вероятность того, что радиальная погрешность места судна на данном участке плавания будет меньше радиуса этого круга. Для этого используется формула кругового закона распределения Релея:
![]() (3.1)
(3.1)
где:М – радиальная СКП места судна на данном участке плавания;
s – запас чистой воды, обеспечивающий безопасное положение судна при наличии неучтенной систематической погрешности и учитывающий габариты судна, а также запас свободного пространства, необходимый для маневра корректуры курса (для выхода судна на заданную линию пути).
Формула (3.1) решается табл. 1-в МТ-75, аргументом которой является величина kP (или R), равная (D – s) / M. В НМТ для расчета вероятности по этой формуле предназначена табл. 4.18.
Так как радиальная погрешность всегда больше любого радиуса-вектора эллипса погрешностей, объективно характеризующего точность места судна, то использование кругового закона приводит к некоторому занижению вероятности безопасного плавания, то есть по этому закону вычисляется перестраховочная оценка вероятности.
Если курс судна проложен так, что ненаблюдаемые навигационные опасности расположены по обе стороны относительно линии предстоящего пути (рис. 3.2), то расчет вероятности безопасного положения судна на данном участке вычисляется с помощью нормального закона распределения.
С этой целью для выбранного способа (наиболее оптимального по критериям точности и надежности) определения места на данном участке плавания вычисляются элементы среднего квадратического эллипса погрешностей и по ним рассчитывается радиус-вектор этого эллипса по направлению на опасности, расположенные на минимальном удалении от линии пути судна (на первом курсе, изображенном на рис.3.2, по направлению отрезков D1 и D2, на втором курсе – по направлению отрезков D3 и D4).
Расчет вероятности безопасного положения судна относительно навигационных препятствий производится по формуле:
![]() (3.2)
(3.2)
где: Ф – интеграл вероятности (функция Лапласа), определяемый по табл. 1-б МТ-75 (или по табл. 4.7 НМТ) по аргументу, стоящему в скобках этой функции;
D1 и D2 – кратчайшие расстояния до ближайших навигационных опасностей, расположенных с левого и правого бортов;
l – действующая полуширина судна [см. формулу (2.1.1)]; m – линейная СКП места по направлению, перпендикулярному линии пути судна (по направлению кратчайшего расстояния до опасности).
При наличии неучтенной систематической погрешности в месте судна ее ожидаемое значение суммируется с величиной l. Если на данном участке района плавания вблизи судна находится одна ненаблюдаемая навигационная опасность, а другие удалены от него на расстояние, превышающее 3М, то оценка вероятности безопасного положения судна производится по той же формуле (3.2), но одно из слагаемых принимается равным единице:
Навигация
- Главная
- Двигатели внутреннего сгорания
- Компания Mazda
- Поршневые двигатели внутреннего сгорания
- Судовой двигатель внутреннего сгорания
- Автомобильные эксплуатационные материалы
- Транспортные характеристики грузов
- Транспорт