Уравнения бокового движения СВП
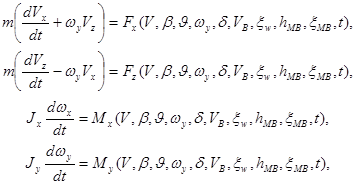
При описании бокового движения СВП используются полусвязанная и связанная системы координат (рис. 1). СВП имеет шесть степеней свободы, однако влияние динамики по дифференту и высоте центра масс на боковое движение СВП мало. Для анализа бокового движения СВП (при отсутствии течения) можно использовать следующую систему четырех уравнений [4]:
 (1)
(1)
где ![]() – масса и моменты инерции СВП по соответствующим осям;
– масса и моменты инерции СВП по соответствующим осям; ![]() – скорость судна и ее проекции;
– скорость судна и ее проекции; ![]() – угловые скорости вращения;
– угловые скорости вращения; ![]() – соответственно, углы дрейфа, крена и перекладки аэроруля;
– соответственно, углы дрейфа, крена и перекладки аэроруля; ![]() – скорость ветра и угол встречи ветра с корпусом судна;
– скорость ветра и угол встречи ветра с корпусом судна; ![]() – высота волны 3%-й обеспеченности и угол волнового склона;
– высота волны 3%-й обеспеченности и угол волнового склона; ![]() ,
, ![]() ,
, ![]() ,
, ![]() – суммарные силы и моменты, действующие на СВП: гидродинамические, аэродинамические, импульсные силы и моменты, а также силы и моменты от средств управления движением (вертикальные аэрорули, горизонтальные аэрорули, ВИШ – винты изменяемого шага) и силы и моменты от волнового воздействия.
– суммарные силы и моменты, действующие на СВП: гидродинамические, аэродинамические, импульсные силы и моменты, а также силы и моменты от средств управления движением (вертикальные аэрорули, горизонтальные аэрорули, ВИШ – винты изменяемого шага) и силы и моменты от волнового воздействия.
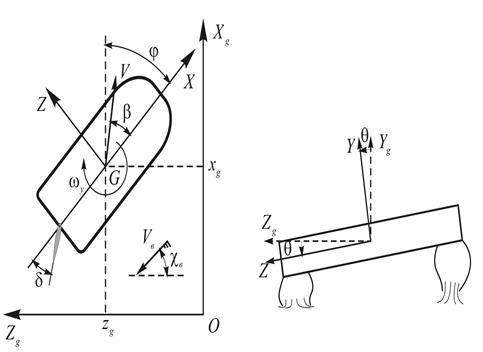
Рисунок 1 – Системы координат при описании бокового движения СВП
Уравнения движения являются нелинейными, так как зависимость сил и моментов от скорости хода, углов крена и дрейфа, угловых скоростей рыскания и крена, угла перекладки руля, скорости и направления ветра являются нелинейными. При наличии волнения силы и моменты являются случайными функциями, спектральные плотности энергии которых зависят от высоты волны, угла встречи с волной и скорости хода СВП.
Для синтеза и анализа регулятора стабилизации путевого угла можно перейти к более простой модели движения, так как при работе регулятора стабилизации путевого угла СВП движется вблизи балансировочного режима.
При переходе к упрощенной модели движения от нелинейной системы (1) скорость хода считается постоянной. При выводе уравнений также учитываются соотношения: ![]() ,
, ![]() . Таким образом, упрощенные уравнения движения СВП имеют вид [3 – 5]:
. Таким образом, упрощенные уравнения движения СВП имеют вид [3 – 5]:
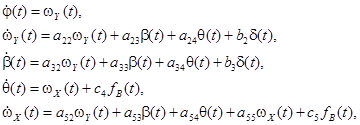 (2)
(2)
где ![]() – случайный процесс, представляет собой возмущение от бортовой качки. Уравнения (2) можно записать в матричном виде:
– случайный процесс, представляет собой возмущение от бортовой качки. Уравнения (2) можно записать в матричном виде:
![]() , (3)
, (3)
где матрицы состояния равны
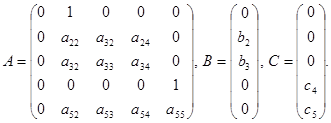
Модель (3) описывает СВП как объект с вектором состояний ![]() , скалярным управлением
, скалярным управлением ![]() и внешним возмущением
и внешним возмущением ![]() .
.
Навигация
- Главная
- Двигатели внутреннего сгорания
- Компания Mazda
- Поршневые двигатели внутреннего сгорания
- Судовой двигатель внутреннего сгорания
- Автомобильные эксплуатационные материалы
- Транспортные характеристики грузов
- Транспорт