Вероятность получения координат судна с помощью автономных систем счисления
Формулы (2.1.2) и (2.1.3) выражают вероятность нахождения судна в пределах ширины фарватера, обусловленную случайной погрешностью в счислимом или обсервованном месте судна (в точке О) по направлению перпендикуляра к оси фарватера. Формулу (2.1.2) целесообразно использовать при автоматизированных расчетах навигационной безопасности плавания, а формулу (2.1.3) – при ручных расчетах с помощью таблиц функций Лапласа.
На рис. 2.2 приведены графики вероятности невыхода корпуса судна за пределы фарватера, вычисленные для различных величин d и l, выраженных в длинах ширины фарватера. За линейную СКП принята величина m = 0,1F.
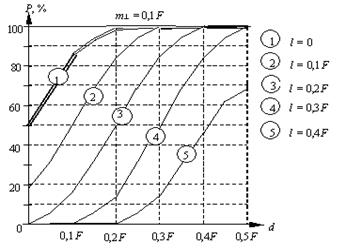
Рисунок 2.2
Анализ этих графиков и формул (2.1.2) и (2.1.3) приводит к следующим выводам:
а) Вероятность нахождения корпуса судна в пределах фарватера при наличии случайных погрешностей в его месте в существенной степени зависит от величины выдвига габаритов судна за линию пути – от численного значения l. Чем больше эта величина, тем выше риск выхода габаритных точек судна за пределы фарватера. При заданных длине (L) и ширине (В) судна максимальное значение l будет при угле сноса с = 90°: l = 0,5L, но такая ситуация (дрейф судна без хода) в реальных условиях плавания по фарватеру маловероятна. Минимальное значение l = 0,5В наблюдается при отсутствии сноса судна (угол с = 0). В этом случае вероятность невыхода судна за пределы фарватера увеличивается до максимального значения (при данных F и mΔ).
б) При одной и той же величине l более существенное уменьшение вероятности невыхода судна за пределы фарватера наблюдается при малых значениях d, то есть чем ближе геометрический центр судна к кромке фарватера, тем сильнее влияние его габаритов на уменьшение вероятности Р. Так, например, учет l = 0,1F при d = 0,1F уменьшает вероятность с 0,84 до 0,50 (на 0,34), а при d =0,3F с 0,9985 до 0,997, то есть всего на 0,0015.
в) При l = 0,5F (действующая полуширина судна равна или превышает полуширину фарватера) при любых погрешностях часть корпуса судна окажется за пределами фарватера. Это значит, что вероятность нахождения всего корпуса судна внутри фарватера равна нулю.
Это подтверждается и с формальных позиций. При l = 0,5F допустимые погрешности Δ1 и Δ2 принимают следующие значения: Δ1 = 0,5F – d, Δ2 = d – 0,5F. При этом, если 0,5F = d, то обе допустимые погрешности обращаются в ноль и, следовательно, формула (2.1.2) даст нулевой результат; если 0,5F = d, то допустимая погрешность Δ1 будет иметь знак "плюс", а равная ей по модулю погрешность Δ2 – знак "минус". Функции Лапласа в квадратных скобках формулы (2.1.2) взаимно компенсируются и вероятность Р обращается в ноль.
г) По мере приближения геометрического центра судна (точки О) к одной из границ фарватера, то есть с уменьшением величины d вероятность невыхода судна за пределы фарватера уменьшается. При d = 0 (судно на кромке фарватера) допустимая погрешность Δ1 уменьшается до величины F – l, а вторая допустимая погрешность Δ2 становится величиной отрицательной (Δ2 = – l). В результате уменьшается первое слагаемое в квадратных скобках формулы (2.1.3), а второе слагаемое вычитается из первого, что и приводит к уменьшению итоговой вероятности Р, которая в таких случаях всегда меньше 0,5.
Навигация
- Главная
- Двигатели внутреннего сгорания
- Компания Mazda
- Поршневые двигатели внутреннего сгорания
- Судовой двигатель внутреннего сгорания
- Автомобильные эксплуатационные материалы
- Транспортные характеристики грузов
- Транспорт