Вероятность получения координат судна с помощью автономных систем счисления
– прогнозируемое кратчайшее расстояние между судами;
– время сближения на кратчайшее расстояние;
– необходимость изменения элементов движения своего судна для безопасного расхождения.
Поскольку за встречным судном всегда ведется визуальное и радиолокационное наблюдение, то его положение относительно своего судна следует считать известным (с определенной погрешностью, зависящей от точности измерения полярных координат встречного судна – пеленга и дистанции).
Процесс расхождения считается завершенным, если судна разошлись на кратчайшем расстоянии, не меньшем допустимого.
Поскольку оценка взаимного положения судна опирается на информацию со случайными погрешностями, то степень безопасности расхождения приобретает вероятностный характер.
Если измерения полярных координат и определения элементов движения встречного судна практически безошибочны, то процесс оценки его положения относительно своего судна становится детерминированным и расчет безопасности расхождения производится на основе общих правил морской практики, МППСС и анализа относительного движения судов.
Общая модель вероятности исключения столкновения с обнаруженным встречным судном, зависящей от правильности управления маневрами судна, может быть описана одним из следующих обобщенных выражений:
 (1.6.1)
(1.6.1)
где:Q – вероятность события, состоящего в том, что кратчайшее расстояние между судами при их следовании неизменными курсами будет меньше допустимого;
P'p – вероятность принятия правильного решения по управлению маневрами судна в процессе расхождения;
QВП – вероятность случайного выхода судна из своей полосы движения и попадания в соседнюю полосу встречного движения.
Первая из этих формул используется при нахождении судов в свободной для мореплавания зоне или полосе (фарватере) двухстороннего движения. Вторая формула используется при плавании судов в двухполосной зоне установленного движения (по системе с разделением полос движения судов).
Вероятностный характер определения дистанции сближения обусловлен случайными погрешностями определения относительной позиции встречного судна и погрешностями оценки его элементов движения.
Одним из условий безопасного расхождения с встречным судном является условие, при котором обеспечивается кратчайшее расстояние между судами, исключающее касание их корпусов, то есть условие, при котором встречное судно всегда находится за пределами зоны безопасности.
Под зоной безопасности понимается пространство между судами, обеспечивающее их безопасное расхождение при следовании неизменными курсами или производство безопасного маневра расхождения.
Для оценки ситуации расхождения необходимо, прежде всего, на основе ведения радиолокационной прокладки спрогнозировать кратчайшее расстояние Dк между судами. Оно определяется по отстоянию линии относительного курса К встречного судна К' от позиции своего судна Мо (рис.1.1) в момент, когда относительный курсовой угол q = 90°.
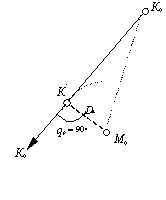
Рисунок 1.1
Если прогнозируемое кратчайшее расстояние меньше допустимого, то предпринимается заблаговременный маневр для увеличения расстояния.
Навигация
- Главная
- Двигатели внутреннего сгорания
- Компания Mazda
- Поршневые двигатели внутреннего сгорания
- Судовой двигатель внутреннего сгорания
- Автомобильные эксплуатационные материалы
- Транспортные характеристики грузов
- Транспорт